
Camiones ambulantes para el ejército estadounidense

Camión para caminar de General Electric. Fuente: wikimedia.org
Vietnam como desafío
Estados Unidos, envuelto en guerras en el sudeste asiático, ha aprendido al menos dos lecciones. El primero es la victoria en tales condiciones sin el uso de armas.la destrucción masiva no se puede ganar. Y la segunda lección es que un terreno extremadamente difícil requiere soluciones extraordinarias. Los vehículos con ruedas e incluso oruga en las selvas de Vietnam estaban lejos de ser siempre adecuados y esto, a su vez, limitaba la movilidad del ejército. El pensamiento de la ingeniería, junto con un presupuesto militar casi ilimitado, dio origen a verdaderos monstruos en los Estados Unidos. Como el Transphibian Tactical Crusher de LeTourneau, un tractor gigante de 95 toneladas construido en solo dos copias en 1967. La máquina en Vietnam, como una cosechadora, trituraba árboles, arbustos, nivelaba montículos y creaba un camino más o menos nivelado para infantería y equipo tradicional. Sin embargo, las dificultades con el transporte de la "trituradora" pusieron fin al desarrollo posterior de la idea. Se necesitaba una solución más elegante. Y lo encontraron en la biónica, es decir, en imitación de soluciones naturales de "ingeniería".La idea de escalar la locomoción del movimiento de caminar al equipo de transporte del Pentágono fue una muy buena idea. Se suponía que debía usar un pedipulador o un análogo mecánico de una extremidad humana (animal) como motor. Y esto no es sin razón: millones de años de evolución han demostrado que es precisamente esta opción de moverse sobre una superficie compleja la más efectiva. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles yque es esta opción de moverse sobre una superficie compleja la más eficaz. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles yque es esta opción de moverse sobre una superficie compleja la más eficaz. Cuando una rueda o una oruga tenga que superar un obstáculo, el pedipulador simplemente lo pasará por encima. Es cierto que en una carretera plana y sólida, todas las ventajas de un andador se desvanecieron: los automóviles y los tanques se movían mucho más rápido y gastaban menos energía en ellos. Pero los estadounidenses en Vietnam necesitaban una técnica para caminar para condiciones extremas fuera de la carretera, por lo que estaban listos para aguantar a baja velocidad.
Army Landwalker 1964 / Fuente: wikimedia.org
Uno de los primeros modelos, aunque pintado en un cartel, fue el Army Landwalker de 1964, presentado en la Feria Mundial de Nueva York. La imaginación de los ingenieros se desbocó: equiparon la cabaña de cuatro patas con dos manipuladores, aparentemente para la evacuación de los heridos. Sin embargo, tal técnica no tenía perspectivas reales, simplemente porque las posibilidades técnicas de implementación estaban ausentes en principio. Los desarrollos obtenidos anteriormente en un laboratorio especial del famoso arsenal de Detroit no mostraron las perspectivas más prometedoras para los pedipuladores. Al mismo tiempo, el ejército estadounidense tenía una demanda de vehículos extremadamente transitables, y esto tenía que tenerse en cuenta.
Ralph Mosher y sus camiones
El ingeniero de General Electric (GE) Ralph Mosher puede considerarse uno de los pioneros de la robótica militar. Casi todo lo que vemos ahora en prototipos conceptuales y modelos operativos en los años 60 y 70 fue implementado por Mosher. Por supuesto, con distintos grados de éxito. A mediados de los 50, bajo su liderazgo, se crearon los primeros prototipos de manipuladores controlados a distancia. El trabajo se llevó a cabo bajo los auspicios del Departamento de Centrales Nucleares de GE. Se suponía que las máquinas reemplazarían a los humanos en el territorio de la contaminación radiactiva o simplemente en el trabajo con sustancias peligrosas. Mosher logró crear manipuladores sorprendentemente sensibles para su época. Entonces, en 1956, su robot Yes-Man Teleoperator pudo ayudar a una niña a ponerse / quitarse el abrigo. Naturalmente, no se trataba de ninguna automatización: el operador controlaba el sistema de forma remota.El ingeniero pudo equipar su desarrollo con un sistema de retroalimentación de fuerza, que hizo posible controlar con mayor precisión el manipulador. Un par de años después, en 1958, Mosher creará un verdadero manitas industrial GE con varios grados de libertad. El dispositivo se describió con los siguientes epítetos:
"Un par de manos con garras, lo suficientemente sensibles como
para empacar huevos, lo suficientemente fuertes como para aplastar
pelotas de golf y lo suficientemente ágiles como para encender un
fósforo".


Teleoperador Yes-Man. Fuente: cyberneticzoo.com




Manitas de GE. Fuente: cyberneticzoo.com
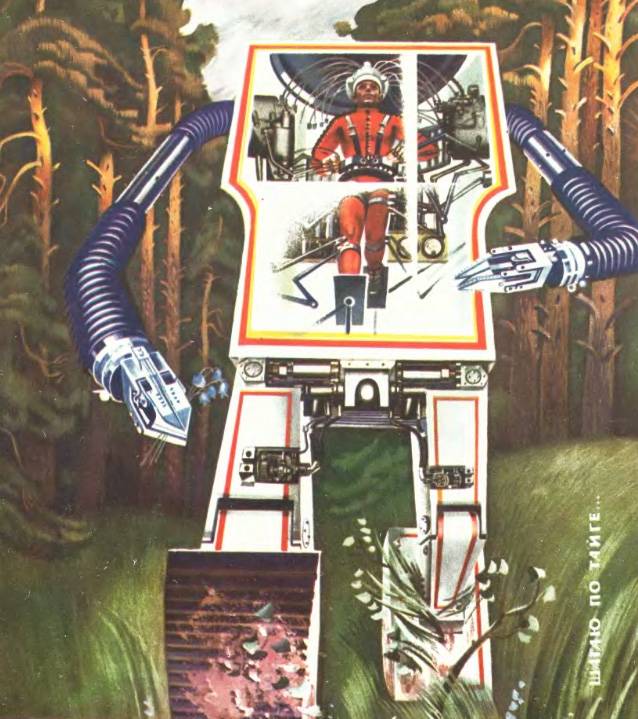
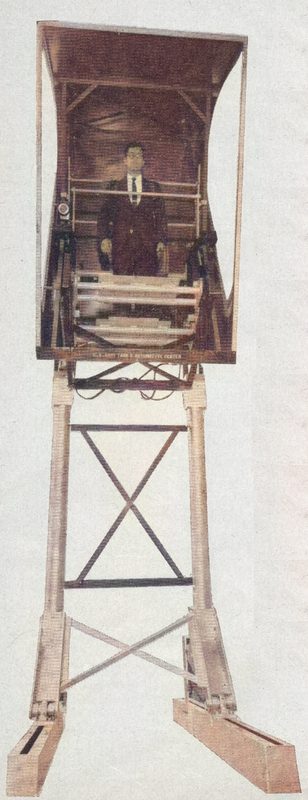
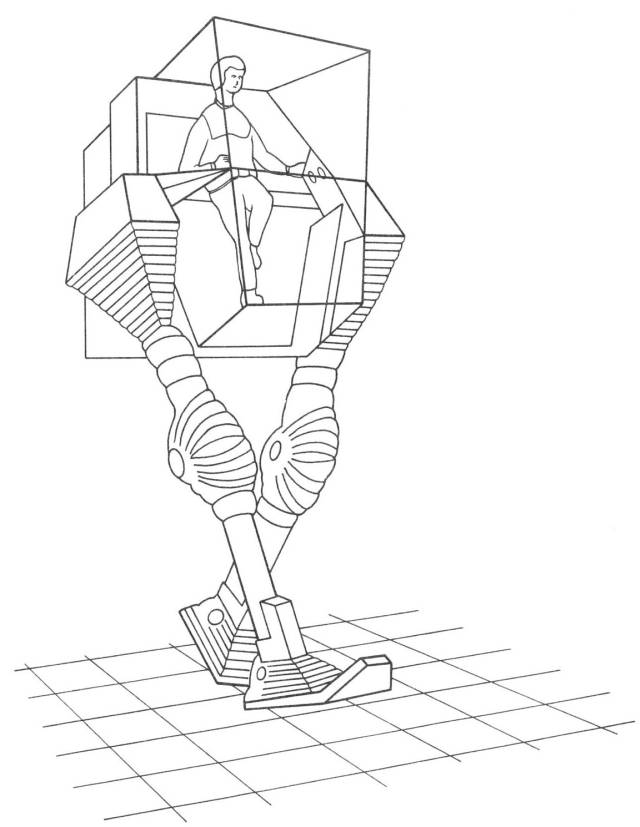
En 1964, el diseñador propuso a todos los interesados y, sobre todo, al ejército estadounidense, el concepto de un transportador de dos piernas, cuyo lugar, muy probablemente, solo estaba en una película de ciencia ficción. El nombre general GE Pedipulator escondió toda una familia de bocetos, uno de los cuales se convirtió en un modelo real. La criatura mecánica bípeda, muy similar a la casa de Baba Yaga, con una altura de 5,5 metros era solo una declaración de las intenciones del autor: el dispositivo no tenía motor ni transmisión. Con esto, el gigante de hierro no pudo realizar ningún trabajo útil, excepto mover a una o dos personas fuera de la carretera. A los militares no les gustó la idea. En primer lugar, el dispositivo resultó ser muy notable. En segundo lugar, era potencialmente muy inestable: no había forma de crear un sistema de estabilización progresivo en ese momento. Y en tercer lugar,la falta de una plataforma de carga limitó seriamente la funcionalidad militar de la máquina Mosher. Incluso dos manipuladores, que el ingeniero propuso integrar en la estructura, no ayudaron, lo que hizo que el aparato pareciera un dinosaurio depredador. Curiosamente, en la Unión Soviética, los futuristas también se dejaron llevar por los pedipuladores bípedos: en 1974, en una de las revistas científicas populares (presumiblemente "Tekhnika Molodoi"), apareció una imagen de una máquina que se parecía mucho a la muerte de Mosher. -conceptos finales. En la interpretación soviética, el control de movimiento se llevó a cabo a través de una interfaz neuronal.que en la Unión Soviética, los futurólogos también se dejaron llevar por los pedipuladores bípedos - en 1974 en una de las revistas de divulgación científica (presumiblemente "Tekhnika Molodoi"), apareció una imagen de una máquina que se parecía mucho al callejón sin salida de Mosher conceptos. En la interpretación soviética, el control de movimiento se llevó a cabo a través de una interfaz neuronal.que en la Unión Soviética, los futurólogos también se dejaron llevar por los pedipuladores bípedos - en 1974 en una de las revistas de divulgación científica (presumiblemente "Tekhnika Molodoi"), apareció una imagen de una máquina que se parecía mucho al callejón sin salida de Mosher conceptos. En la interpretación soviética, el control de movimiento se llevó a cabo a través de una interfaz neuronal.
Fantasías soviéticas sobre robots bípedos. Fuente: cyberneticzoo.com

Por lo tanto, Mosher vio una solución al problema de la permeabilidad de los vehículos militares. Fuente: cyberneticzoo.com
La experiencia con las máquinas para caminar de dos patas se incorporó al desarrollo del vehículo Walking Truck en 1969. El desarrollo todavía tiene un par de varios nombres: Cybernetic Anthropomorphous Machine y Quadruped Transporter. Con un alto grado de confianza, el automóvil se llama el abuelo del perro robot moderno Spot de Boston Dynamics. El proyecto Mosher recibió una amplia financiación de DARPA y TARDEC (Dirección de Blindados del Ejército de EE. UU.). Por cierto, los militares mismos no pudieron recordar su propio proyecto de un camión con el nombre largo: vehículo de cuatro patas ATAC. El proyecto no avanzó más allá de los primitivos modelos de madera, y se decidió centrar los esfuerzos en la idea de Mosher. Sugirió mover la cabina del conductor al centro de la base del camión, dejando poco espacio para la plataforma de carga.Sin embargo, esta vez se trató de desarrollar un prototipo funcional.


El ejército estadounidense también ha estado trabajando en un camión ambulante. No funcionó muy bien. Fuente: cyberneticzoo.com
El Walking Truck era un transportador de cuatro patas de 1,3 toneladas capaz de transportar aproximadamente 270 kg de carga útil junto con el operador. La planta de energía era un motor de gasolina de 90 caballos de fuerza, que teóricamente se suponía que aceleraba el automóvil a 55 km / h. Pero esto es en teoría, pero en la práctica estaba limitado a 8 km / h. Incluso esta velocidad se logró con grandes reservas. Se trata del sistema hidráulico, que requiere al menos 250 litros de aceite, que simplemente no tenía dónde colocar, por lo que el camión se movió con una correa de varias mangueras de aceite. Y la presión en la "hidráulica" varió de 163 a 220 atmósferas.








Walking Truck en varias etapas de desarrollo. Fuente: cyberneticzoo.com
También hubo dificultades con la estabilidad de la mula de hierro de 4,5 metros. Cuando sacaron el coche de Mosher a dar un paseo al aire libre, estaba equipado con barras antivuelco. Esto, por supuesto, no agregó ninguna maniobrabilidad o capacidad de carga al camión.
Pero las mayores dificultades aguardaban al operador de esta asombrosa máquina de cuatro patas. Una persona tenía que manipular simultáneamente todas las extremidades para simplemente poner el pie del Walking Truck en un escalón. Al mismo tiempo, el caballo de hierro vibraba constantemente, crujía, se tambaleaba y amenazaba con volcarse. En general, después de media hora de tal trabajo, el aparato vestibular del operador falló.
Todas estas dificultades se iniciaron solo para caminar libremente sobre cuerpos de agua poco profundos, empujar jeeps ligeros fuera del lodo y escalar baches empinados con éxito variable (si el Walking Truck no gira). Como resultado, el Pentágono, al evaluar el potencial para crear caballos de hierro, rechazó más fondos. Y el sector civil no necesitaba tales delicias en absoluto.
Ahora se puede encontrar un ejemplo único de un camión andante en la exposición del Museo Americano de Transporte Militar.
- Autor:
- Evgeny Fedorov
No hay comentarios:
Publicar un comentario